-
1 скорость в сети
nconstruct. Netzgeschwindigkeit -
2 скорость сообщения
скорость сообщения
Средняя скорость перемещения транспортного средства по улично-дорожной сети между двумя пунктами
[Терминологический словарь по строительству на 12 языках (ВНИИИС Госстроя СССР)]Тематики
EN
DE
FR
Русско-немецкий словарь нормативно-технической терминологии > скорость сообщения
-
3 сеть
(ж)Netz (n);сеть наблюдений — Beobachtungsnetz (n);
канализационная сеть — Entwässerungsnetz (n); Kanalisationsnetz (n);
внутренняя канализационная сеть — Grundstücksentwässerungsnetz (n); inneres Entwässerungsnetz (n);
дренажная сеть — Dränagerohrnetz (n); Entwässerungsnetz (n);
тупиковая сеть — Einzelstrangnetz (n);
осушительная, дренажная сеть — Entwässerungsnetz (n);
речная сеть — Flussnetz (n);
оросительная сеть — Bewässerungsnetz (n); Berieselungsnetz (n);
водосточная сеть — Sielnetz (n);
гидрологическая сеть — Pegelnetz (n);
геодезическая сеть — Vermessungsnetz (n); geodätisches Netz (n);
домовая сеть — Hausleitung (f);
сеть каналов — Kanalnetz (n);
сеть передачи электроэнергии — Kraftübertragungsnetz (n); Übertragungsnetz (n);
сеть коммуникаций — Leitungsnetz (n);
нагрузка сети — Netzbelastung (f);
местная сеть — Ortsnetz (n);
сеть водомерных постов — Pegelnetz (n);
сеть системы — Systemnetz (n);
сеть питьевого водоснабжения — Trinkwassernetz (n); Trinkwasserrohrnetz (n);
сеть хозяйственно-питьевого водопровода — Trinkwasserrohrnetz (n); Trinkwasserleitungsnetz (n);
сеть водопровода — Wasserleitungsrohrnetz (n); Wasserrohrnetz (n);
-
4 прямой пуск вращающегося электродвигателя
прямой пуск вращающегося электродвигателя
Пуск вращающегося электродвигателя путем непосредственного подключения его к питающей сети.
[ ГОСТ 27471-87]EN
direct-on-line starting
across-the-line starting (US)
the process of starting a motor by connecting it directly to the supply at rated voltage
[IEV number 411-52-15]FR
démarrage direct
mode de démarrage d'un moteur, consistant à lui appliquer directement sa pleine tension assignée
[IEV number 411-52-15]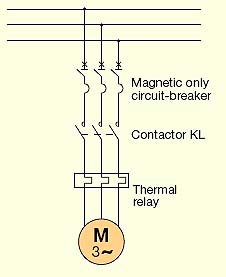
Рис. ABB
Схема прямого пуска электродвигателяMagnetic only circuit-breaker - Автоматический выключатель с электромагнитным расцепителем
Contactor KL - Контактор KL
Thermal relay - Тепловое реле
Параллельные тексты EN-RU
Direct-on-line starting
Direct-on-line starting, which is often abbreviated as DOL, is perhaps the most traditional system and consists in connecting the motor directly to the supply network, thus carrying out starting at full voltage.Direct-on-line starting represents the simplest and the most economical system to start a squirrel-cage asynchronous motor and it is the most used.
As represented in Figure 5, it provides the direct connection to the supply network and therefore starting is carried out at full voltage and with constant frequency, developing a high starting torque with very reduced acceleration times.
The typical applications are relevant to small power motors also with full load starting.
These advantages are linked to some problems such as, for example, the high inrush current, which - in the first instants - can reach values of about 10 to 12 times the rated current, then can decrease to about 6 to 8 times the rated current and can persist to reach the maximum torque speed.The effects of such currents can be identified with the high electro-dynamical stresses on the motor connection cables and could affect also the windings of the motor itself; besides, the high inrush torques can cause violent accelerations which stress the transmission components (belts and joints) generating distribution problems with a reduction in the mechanical life of these elements.
Finally, also the possible electrical problems due to voltage drops on the supply line of the motor or of the connected equipment must be taken into consideration.
[ABB]Прямой пуск
Прямой пуск, который по-английски часто сокращенно обозначают как DOL, является, пожалуй наиболее распространенным способом пуска. Он заключается в непосредственном (т. е. прямом) подключении двигателя к питающей сети. Это означает, что пуск двигателя осуществляется при полном напряжении.Схема прямого пуска является наиболее простым, экономичным и чаще всего применяемым решением для электродвигателей с короткозамкнутым ротором.
Схема прямого подключения к сети представлена на рисунке 5. Пуск осуществляется при полном напряжении и постоянной частоте сети. Электродвигатель развивает высокий пусковой момент при коротком времени разгона.
Типичные области применения – маломощные электродвигатели, в том числе с пуском при полной нагрузке.
Однако, наряду с преимуществами имеются и определенные недостатки, например, бросок пускового тока, достигающий в первоначальный момент 10…12-кратного значения от номинального тока электродвигателя. Затем ток двигателя уменьшается примерно до 6…8-кратного значения номинального тока и будет держаться на этом уровне до тех пор, пока скорость двигателя не достигнет максимального значения.
Такое изменение тока оказывает значительное электродинамическое воздействие на кабель, подключенный к двигателю. Кроме того пусковой ток воздействует на обмотки двигателя. Высокий начальный пусковой момент может привести к значительному ускорению и следовательно к значительной нагрузке элементов привода (ремней, крепления узлов), что вызывает сокращение их срока службы.
И, наконец, следует принять во внимание возможное возникновение проблем, связанных с падением напряжения в линии питания двигателя и подключенного к этой линии оборудования.
[Перевод Интент]
Тематики
Синонимы
EN
- across-the-line starting (US)
- direct line starting
- direct operation of a motor
- direct starting
- direct-on-line starting
- DOL
- full voltage starter application
DE
FR
Русско-немецкий словарь нормативно-технической терминологии > прямой пуск вращающегося электродвигателя
-
5 средняя
средняя ж. величина ж. Durchschnitt m; Durchschnittsgröße f; Durchschnittswert m; Mittel n; Mittelgröße f; Mittelwert m; Zwischenwert m; mittlerer Wert mсредняя ж. длина ж. свободного пробега распада Zufallsweg m; Zufallsweglänge f; яд. mittlere freie Zufallsweglänge fсредняя ж. квадратическая ошибка ж. Quadratfehler m; Standardabweichung f; mittlerer quadratischer Fehler mсредняя ж. мощность ж. Durchschnittsleistung f; Mittelleistung f; Normalleistung f; durchschnittliche Leistung fсредняя ж. скорость ж. выч. Durchschnittsgeschwindigkeit f; авто. Mittelgang m; durchschnittliche Geschwindigkeit fсредняя ж. сферическая сила ж. света фот. mittlere räumliche Lichtstärke f; mittlere sphärische Lichtstärke fсредняя ж. удельная работа ж. деформации mittlere spezifische Formänderungsarbeit f; mittlere spezifische Formänderungsenergie f -
6 линия проводной связи
линия проводной связи
Воздушная или кабельная электрическая линия связи.
[Терминологический словарь по строительству на 12 языках (ВНИИИС Госстроя СССР)]
проводные линии связи
В вычислительных сетях проводные линии связи представлены коаксиальными кабелями и витыми парами проводов.
Используются коаксиальные кабели: "толстый" диаметром 12,5 мм и "тонкий" диаметром 6,25 мм. "Толстый" кабель имеет меньшее затухание, лучшую помехозащищенность, что обеспечивает возможность работы на больших расстояниях, но он плохо гнется, что затрудняет прокладку соединений в помещениях, и дороже "тонкого".
Существуют экранированные (STP - Shielded Twist Pair) и неэкранированные (UTP - Unshielded Twist Pair) витые пары проводов. Экранированные пары сравнительно дороги. Неэкранированные витые пары имеют несколько категорий (типов). Обычный телефонный кабель - пара категории 1. Пара категории 2 может использоваться в сетях с пропускной способностью до 4 Мбит/с. Для сетей Ethernet (точнее, для ее варианта с названием 10Base-T) разработана пара категории 3, а для сетей Token Ring - пара категории 4. Наиболее совершенной является витая пара категории 5, которая применима при частотах до 100 МГц. В паре категории 5 проводник представлен медными жилами диаметром 0,51 мм, навитыми по определенной технологии и заключенными в термостойкую изолирующую оболочку. В высокоскоростных ЛВС на UTP длины соединений обычно не превышают 100 м. Затухание на 100 МГц и при длине 100 м составляет около 24 дБ, при 10 МГЦ и 100 м - около 7 дБ.
Витые пары иногда называют сбалансированной линией в том смысле, что в двух проводах линии передаются одни и те же уровни сигнала (по отношению к земле), но разной полярности. При приеме воспринимается разность сигналов, называемая парафазным сигналом. Синфазные помехи при этом самокомпенсируются.
[И.П. Норенков, В.А. Трудоношин. Телекоммуникационные технологии и сети. МГТУ им. Н.Э.Баумана. Москва 1999]
Проводные линии связиПроводные (воздушные) линии связи используются для передачи телефонных и телеграфных сигналом, а также для передачи компьютерных данных. Эти линии связи применяются в качестве магистральных линий связи.
По проводным линиям связи могут быть организованы аналоговые и цифровые каналы передачи данных. Скорость передачи по проводным линиям "простой старой телефонной линии" (POST - Primitive Old Telephone System) является очень низкой. Кроме того, к недостаткам этих линий относятся низкая помехозащищенность и возможность простого несанкционированного подключения к сети.
[ http://www.lessons-tva.info/edu/telecom-loc/m1t2_2loc.html]Тематики
- линии, соединения и цепи электросвязи
Синонимы
EN
DE
FR
Русско-немецкий словарь нормативно-технической терминологии > линия проводной связи
-
7 вентилятор
вентилятор
Вращающаяся лопаточная машина, передающая механическую энергию газа в одном или нескольких рабочих колесах, вызывая таким образом непрерывное течение газа при его относительном максимальном сжатии 1,3.
[ ГОСТ 22270-76]
вентилятор
Нагнетательная машина для создания избыточного (до 0,015 МПа) давления воздуха (газа) и его перемещения.
Примечание
Создаваемый вентилятором напор расходуется в основном для преодоления сопротивления сети, по которой транспортируется газ. По принципу действия различают центробежные (радиальные), осевые и вихревые вентиляторы. Центробежные вентиляторы подразделяются на прямоточные, дисковые, смерчевые и диаметральные. Давление в вентиляторах, являющихся объемными нагнетателями, повышается при закручивании потока газа.
[РД 01.120.00-КТН-228-06]-
По направлению потока газа:
-
радиальные (центробежные):
-
По количеству сторон всасывания:
-
По.............................................:
- Вытяжные;
-
По создаваемому давлению:
- Низкого давления (полное давление до 1000 Па);
- Среднего давления (полное давление от 1000 до 3000 Па);
- Высокого давления (полное давление от 3000 до 12 000 Па);
-
По типу рабочего колеса:
- С загнутыми вперед лопатками рабочего колеса;
- С загнутыми назад лопатками рабочего колеса;
-
По положению в пространстве:
- Горизонтальные;
-
Вертикальные:
- Рабочим колесом вверх;
- Рабочим колесом вниз;
- С возможностью установки корпуса на станине в любом положении с шагом 45 градусов;
-
По типу корпуса:
- беcкорпусной;
- спиральный;
- Полуспиральный;
- Разъемный/неразъемный;
- Поворотный/неповоротный;
-
Канальный:
- Для круглых воздуховодов;
- Для прямоугольных воздуховодов;
-
По количеству сторон всасывания:
-
осевые:
- В цилиндрическом корпусе (с двигателем в обечайке);
- С двигателем вне потока газа;
- вытяжной вентилятор;
- Приточный вентилятор;
- с меридиональным ускорением;
- с постоянной меридиональной скоростью;
- диаметральные;
- диагональные;
-
радиальные (центробежные):
-
По направлению вращения рабочего колеса:
-
По числу ступеней:
- одноступенчатый;
-
многоступенчатый;
- одинакового вращения рабочих колес;
- встречного впащения рабочих колес;
-
По положению в пространстве:
-
По регулированию частоты вращения:
- нерегулируемый;
- Настраиваемые (с клиноременным вариатором частоты вращения);
-
регулируемый:
- Со ступенчатым регулированием частоты вращения;
- С плавным регулированием частоты вращения;
-
По возможности реверсирования:
- реверсиные;
- Нереверсивные;
-
По конструктивному исполнению привода:
- с непосредственным приводом( с непосредственным закреплением рабочего колеса на валу электродвигателя);
- С ременным приводом (рабочее колесо закреплено на валу в подшипниковых опорах, вращение от электродвигателя передается через клиноременную передачу);
-
По назначению:
-
Общего назначения:
- Общего назначения теплостойкие;
- для обычных сред;
- Специальные;
- теплостойкого исполнения;
-
коррозионностойкие:
- Коррозионностойкие теплостойкие;
-
взрывозащищенные:
- Взрывозащищенные теплостойкие;
- Взрывозащищенные коррозионностойкие;
-
Пылевые:
- Пылевые взрывозащищенные;
- Пылевые взрывозащищенные коррозионностойкие;
- дутьевые;
- Струйные;
- Дымососы;
- Вентиляторы дымоудаления;
- Шахтные
-
Общего назначения:
-
По месту установки:
-
По материалу:
- из углеродистой стали;
- из оцинкованной стали;
- из разнородных металлов;
- из нержавеющей стали;
- из алюминиевых сплавов;
- из чугуна.
<> ОСНОВНЫЕ ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ <> ВЕНТИЛЯТОРА
- <>Установленная мощность, кВт
- <>Частота вращения, мин -1
- <>Производительность, тыс. м3/час
- <>Полное давление, Па
- <>Динамическое давление, Па
- <>Окружная скорость рабочего колеса, м/с
- <>Огнестойкость
- <>Уровень звуковой мощности шума во всасывающем воздуховоде вентилятора
- <>Уровень звуковой мощности шума в нагнетательном воздуховоде вентилятора
- <>Уровень звуковой мощности шума всасывания вентилятора
- <>Уровень звуковой мощности шума нагнетания вентилятора
- <>Уровень звуковой мощности шума вентилятора в окружающем пространстве
- <>Уровень звуковой мощности шума вентилятора, установленного в стене
<> АЭРОДИНАМИЧЕСКИЕ ХАРАКТЕРИСТИКИ ВЕНТИЛЯТОРА (примеры)
-
<>Аэродинамические характеристики приведены для нормальных условий (плотность 1,2 кг/м3, барометрическое давление 101,34 кПа, температура +200 °С и относительная влажность 50%)
-
<>Для вентиляторов, перемещающих воздух и газ, который имеет плотность, отличающуюся от 1,2 кг/м3, аэродинамические характеристики должны пересчитываться по ГОСТ 10616-90.
-
<>При пересчете аэродинамических характеристик в интервале температур от минус 40 до 80 °С применять следующие зависимости:
-
<>а) плотность воздуха при температуре t °C:<> Р = Рн 293/(273+t) кг/м3, где Рн = 1,2 кг/м3 - плотность воздуха для нормальных условий при t = 20 °С,
- <>б) давление Рv и Рdv пропорциональны плотности воздуха
Тематики
Обобщающие термины
EN
DE
Русско-немецкий словарь нормативно-технической терминологии > вентилятор
-
По направлению потока газа:
-
8 программируемый логический контроллер
- speicherprogrammierbare Steuerung, f
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего. Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы. Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7. Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series. Рис. 4. Резервированный контроллер FCP270.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA). Рис. 5. Контроллер AC800M.
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Русско-немецкий словарь нормативно-технической терминологии > программируемый логический контроллер
См. также в других словарях:
скорость символов данных — Суммарная скорость в сети (с учетом заголовка символа синхронизации), на которой передают символы с кадрами данных (= 4000 символов данных в секунду) (МСЭ Т G.992.3). [http://www.iks media.ru/glossary/index.html?glossid=2400324] Тематики… … Справочник технического переводчика
скорость передачи — скорость передачи: Количество бит, передаваемых в единицу времени. Источник: ГОСТ Р 51386 99: Аппаратура радиорелейная. Цепи стыка. Методы измерений параметров оригинал документа … Словарь-справочник терминов нормативно-технической документации
скорость передачи данных пользователя фиксированной сети — Скорость передачи данных пользователя между функцией взаимодействия (IWF) и фиксированной сетью. (МСЭ Т Q.1741). [http://www.iks media.ru/glossary/index.html?glossid=2400324] Тематики электросвязь, основные понятия EN fixed network user rate … Справочник технического переводчика
Скорость передачи стартстопного сигнала — Скорость передачи стартового и единичных элементов внутри одной стартстопной кодовой комбинации Источник … Словарь-справочник терминов нормативно-технической документации
скорость доступа — представляет собой максимальную скорость передачи данных, при которой данные могут поступать в сеть или извлекаться из сети. Она определяется по скорости канала доступа. Скорость в доступе согласуется на определенный период времени на основании… … Справочник технического переводчика
скорость обслуживания — Скорость битового потока, доступного пользователям для передачи информации. [http://www.lexikon.ru/dict/net/index.html] Тематики сети вычислительные EN service bit rate … Справочник технического переводчика
скорость передачи символов цифрового сигнала электросвязи — Число символов цифрового сигнала электросвязи, передаваемых в единицу времени. [ГОСТ 22670 77] Тематики сети передачи данных Синонимы скорость передачи символов EN digit rate … Справочник технического переводчика
скорость сообщения — Средняя скорость перемещения транспортного средства по улично дорожной сети между двумя пунктами [Терминологический словарь по строительству на 12 языках (ВНИИИС Госстроя СССР)] Тематики транспорт в целомуслуги транспортные EN traffic speed DE… … Справочник технического переводчика
скорость — 05.01.18 скорость (обработки) [rate]: Число радиочастотных меток, обрабатываемых за единицу времени, включая модулированный и постоянный сигнал. Примечание Предполагается возможность обработки как движущегося, так и неподвижного множества… … Словарь-справочник терминов нормативно-технической документации
Скорость передачи информации — Разъём 8P8C. Скорость передачи информации скорость передачи данных, выраженная в количес … Википедия
СКОРОСТЬ СООБЩЕНИЯ — средняя скорость перемещения транспортного средства по улично дорожной сети между двумя пунктами (Болгарский язык; Български) средна скорост на предвижване на транспорт (Чешский язык; Čeština) rychlost spojení (Немецкий язык; Deutsch)… … Строительный словарь
 18+© Академик, 2000-2024
18+© Академик, 2000-2024- Обратная связь: Техподдержка, Реклама на сайте
Экспорт словарей на сайты, сделанные на PHP, Joomla, Drupal, WordPress, MODx.
Перевод: с русского на немецкий
с немецкого на русский- С немецкого на:
- Русский
- С русского на:
- Все языки
- Английский
- Немецкий
- Французский